Skip to content
कृत्रिम-इंटेलिgence
It's inevitable
Home
Artificial Intelligence
Machine Learning
Supervised Learning
Unsupervised Learning
Reinforcement Learning
Deep Learning
Convolution Neural Network (CNN)
Real-Time Gaze-Controlled Media Player: Hands-Free Interaction Using Eye Tracking
Robotics
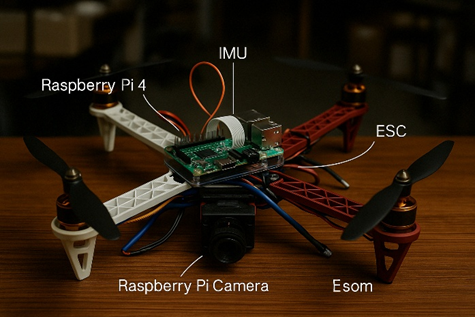
Veg Drone: SLAM-Based Surveillance Quadcopter with Onboard Vision and Fault Recovery
Aerial Robotics & Drones
Real-Time Object Detection and Navigation AI Rover | Building Intelligence at the Edge
Data Analytics
TFuzzyScore: A Hybrid Similarity Metric Combining TF-IDF and Fuzzy Logic for Entity Mapping in Structured Text
Extending Power BI Usage Metrics Beyond 30 Days Using Azure and Databricks
Optimizing Null Checks and Multi-Granularity Deduplication in Scalable SQL Pipelines
Articles
Run Notebook
Blog
File Converter
About Us
Contact us
Archive Post
mechatronics.abhishek
0 comments
Veg Drone: SLAM-Based Surveillance Quadcopter with Onboard Vision and Fault Recovery
📄 Read the full peer-reviewed preprint on Arxiv: View Full…
Read More