Introduction –
UAV – A UAV (Unmanned Aerial Vehicle), commonly known as a drone, is an aircraft or flying object without a human pilot. Essentially, drones or UAVs are equipped with a self-functioning robotics module that enables them to navigate autonomously to their desired location or destination.
Drones or UAVs are characterized by two modes of operation: one in which they function autonomously without human intervention, and another where they are remotely operated by a human. UAVs are a component of the UAS (Unmanned Aerial System), which includes both Unmanned Aerial Vehicles and a ground-based controller for aerial vehicles.
UAS can be classified into two types, as follows:
- UAV – Aerial Robots
- RPV – Remotely Piloted Vehicle
Types of MAV (Micro Aerial Vehicles):
- Fixed Wing (A General Atomics MQ-9 Reaper, a hunter-killer surveillance UAV, Rustom – DRDO etc.)
- Flopping Wing (Insect Flight, Avion Flight etc.)
- Rotor Craft (Helicopter, Ducted Fan, Co-axial etc.)
Exploring Quadcopter and Hexacopter Drones
In this module, we will delve into two popular types of drones: the Quadcopter and the Hexacopter.
Quadcopters: The Versatile Workhorses of the Drone World
Quadcopters have become some of the most widely recognized drones in the global market. Their applications are vast and varied, ranging from rescue operations and surveillance to delivery services and studying inaccessible landscapes. These drones have proven to be invaluable tools across multiple industries due to their versatility and functionality.
A Quadcopter is a type of UAV (Unmanned Aerial Vehicle) or RPV (Remotely Piloted Vehicle) equipped with four rotors. The key advantage of a Quadcopter lies in its relatively small size and low inertia, which allows for a simplified flight control system. This makes quadcopters not only easy to operate but also highly maneuverable, even in tight or challenging environments. The combination of stability, ease of control, and adaptability makes Quadcopter drones an essential part of both professional and recreational drone usage.
Design Principles –
The fundamental design of a Quadcopter revolves around the configuration and operation of its rotors. Each rotor is responsible for producing lift, torque around its center of rotation, and drag that opposes the direction of the vehicle’s flight.
A key characteristic of a Quadcopter is the specific rotor rotation pattern. Typically, the motors on diagonally opposite corners of the drone rotate in the same direction. For instance, one diagonal pair of motors might rotate clockwise. Meanwhile, the other diagonal pair of motors rotates in the opposite direction, typically counterclockwise. This arrangement is crucial for maintaining stability and preventing unwanted rotation of the entire drone during flight.
By utilizing this rotational counterbalance, Quadcopter drones can avoid spinning uncontrollably while maintaining stable flight, even under various external forces or wind conditions. This design allows for precise control, making Quadcopter drones a popular choice for both professional applications and recreational use.

Quadcopter Movement and Control Principles
To control the movement of a Quadcopter, the rotation speed of its motors (measured in RPM) plays a critical role. When you want the drone to roll or pitch, you adjust the RPM of specific motors. Increasing the RPM of motors on one side of the drone while keeping the other motors at a constant speed causes the Quadcopter to tilt in the direction of the increased RPM. This results in a roll or pitch motion.
For instance, if you want to move the drone horizontally from one point to another, you simply increase the RPM of the motors on one side of the drone while keeping the opposite motors at a constant speed. The drone will move in the opposite direction of the motors with increased speed. This behavior is essential for smooth and controlled horizontal movement.
Translation: –

Rolls and Pitch –
To roll or pitch the drone, the more the motors rotate (RPM) the more the Quadcopters tilt in that direction while other motors are having constant RPMs.
Degrees of Freedom (DOF)
A Quadcopter has a total of 6 Degrees of Freedom (DOF), which consist of:
- 3 Translational: Movement along the X, Y, and Z axes (forward/backward, left/right, and up/down)
- 3 Rotational: Pitch, Roll, and Yaw movements
These six degrees of freedom provide the drone with the ability to move in three-dimensional space while also allowing for rotation around its center.
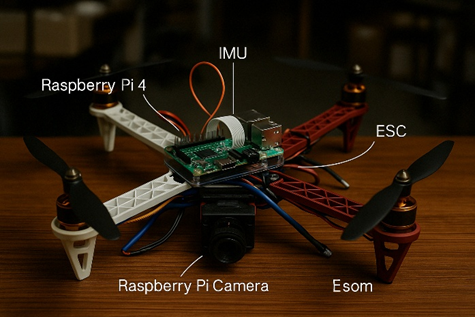
Working Components in UAVs
UAVs, especially in applications like defense, industrial, and scientific fields, rely on several key components:
- State Estimation: This involves estimating the position and velocity (including angular velocity) of the UAV to understand its current state in the environment.
- Control: The control system is responsible for commanding the motors and producing the necessary actions to navigate the UAV to the desired state.
- Mapping: UAVs require mapping capabilities to understand and visualize their environment. This helps them avoid obstacles and plan paths efficiently.
- Planning: The planning module computes the UAV’s trajectory and ensures a safe path is available to travel from one point to another.
Navigation Without GPS (or Other Satellite Systems)
In situations where GPS, NAVIC, or GLONASS are unavailable or unreliable, UAVs rely on alternative sensors for mapping and navigation. Some of the key sensors used in these cases include:
- Scanning Laser Range Finder: Devices like the Hokuyo UTM-30 LX are commonly used for precise distance measurement and environmental mapping.
- Colour and Depth Cameras: Sensors such as the Kinect Sensor (for XBOX 360) or the Raspberry Pi Camera can be used to capture both color and depth information, enabling the drone to understand its surroundings in 3D.
- USB Cameras: Cameras like the mvBlueFox are used for image capture, which assists in visual navigation when GPS signals are unavailable.
These sensors allow UAVs to navigate complex environments where traditional satellite navigation systems fail, ensuring the drone can still perform tasks efficiently.

Simultaneous Localization and Mapping (SLAM) in UAVs
Imagine a robot equipped with an Inertial Measurement Unit (IMU), which allows it to estimate its movement as it transitions from one position to another. As the robot moves, it tracks the change in position, denoted as Δx. Upon reaching a new position, the range finder on the robot estimates the distances to previously measured objects (pillars), initially denoted as d1,d2,d3d_1, d_2, d_3. However, after moving, these distance estimates are now updated to d1′,d2′,d3′d_1′, d_2′, d_3′, which may differ from the original measurements.
The key question here is: Can the robot simultaneously estimate both the locations of the pillars and its displacement (Δx)?
This challenge is central to Simultaneous Localization and Mapping (SLAM), a problem where the robot must not only estimate its own location but also build a map of its environment in real-time. Specifically, in this scenario, the robot is trying to localize itself by estimating its displacement (Δx) while simultaneously mapping the positions of the pillars, represented as pairs of coordinates x1,y1x_1, y_1, x2,y2x_2, y_2, and x3,y3x_3, y_3.
Concurrent Estimation
In the SLAM problem, the robot needs to concurrently estimate two key sets of variables:
- Location of Pillars: 6 variables (3 pairs of X, Y coordinates for the pillars).
- Displacement of the Robot: 2 variables (Δx, representing the robot’s change in position).
What is SLAM?
Simultaneous Localization and Mapping (SLAM) is a computational technique used to construct a map of an unknown environment while simultaneously keeping track of the robot’s location within that environment. This dual-task problem requires sophisticated algorithms to help the robot “understand” and navigate in an unfamiliar space while also mapping it.
Several algorithmic approaches are commonly used to perform SLAM for UAVs and other robots:
- Kalman Filters and Particle Filters: These probabilistic filters are widely used in SLAM for continuous estimation of both the robot’s location and the map it is building.
- Commercialized SLAM Systems: Google’s ARCore is one such example that applies SLAM techniques to build virtual environments for augmented reality (AR) applications.
- Monte Carlo Method: This method is another powerful approach for solving the SLAM problem by utilizing random sampling to represent potential locations and maps.
- Augmented and Virtual Reality (AR/VR) Techniques: These are used to map the environment and create virtual representations for navigation and interaction in real-time.
Mapping in SLAM
In SLAM, two types of maps are typically used: Topological Maps and Geometric Maps.
- Topological Maps: These maps represent the environment in terms of the connectivity between various locations, rather than their precise geometry. In topological SLAM, the robot doesn’t need to build a fully detailed map, but instead, it focuses on understanding the relationships and connections between different locations. This approach is often used in commercial and defense-based UAV systems because it can ensure global consistency in larger environments. In scenarios where the UAV cannot directly observe the environment, techniques like Computer Vision and Convolutional Neural Networks (CNNs) are employed to create virtual environments or map unobserved areas. Pattern recognition algorithms such as LeNet5 are used to detect and categorize objects within the UAV’s environment.
Applications of SLAM in UAVs
SLAM techniques are integral for enabling UAVs to navigate in complex environments, especially in situations where GPS signals are unreliable or unavailable. SLAM allows the UAV to build a dynamic map of its surroundings, which is critical for planning safe flight paths, avoiding obstacles, and ensuring accurate navigation.
By combining SLAM with advanced sensors and algorithms, UAVs can operate autonomously in unknown or GPS-denied environments, making them invaluable tools for industries such as defense, logistics, and environmental monitoring.